
Self-Propelled Toy Fish, Arthur Lee, Patent No. 2,066,353
The patent by Arthur Lee of Chicago, Illinois, describes a Self-Propelled Toy Fish (Patent No. 2,066,353), filed in 1935 and granted in 1936. This invention is a highly efficient mechanical aquatic toy that mimics the natural, multi-axial swimming motion of a real fish. Unlike contemporary toys that relied on simple “back-and-forth” paddling, Lee’s design utilizes a specialized eccentric drive to produce simultaneous lateral (side-to-side) and vertical (up-and-down) tail movements, providing superior propulsion through the water.
The “Why”
In the 1930s, most mechanical aquatic toys were prone to “stalling” or moving in unrealistic, jerky patterns. The primary pain point was the mechanical limitation of the “tail-wag.” A simple horizontal swing often failed to generate enough displacement to move a buoyant body forward effectively. Lee sought to solve this by creating a compound motion—a “sculling” effect—that could be powered by a simple, replaceable rubber band motor or a more robust clockwork mechanism.
Inventor Section: Engineering Philosophy
Arthur Lee’s approach focused on modular accessibility and biomimicry. Writing during the Industrial Revolution’s refinement phase, Lee designed his toy to be “taken apart and re-assembled by an inexperienced child… without tools.” This engineering philosophy prioritized durability through simplicity, ensuring that the high-wear part of the machine (the elastic motor) could be serviced by the end-user. His work represents a bridge between 19th-century folk-toy craftsmanship and 20th-century precision industrial design.
Key Systems Section
1. Compound Pivot & “Ball-Bearing” Rocker
At the rear of the fish, Lee implemented a unique pivot system that allows for three-dimensional freedom of movement.
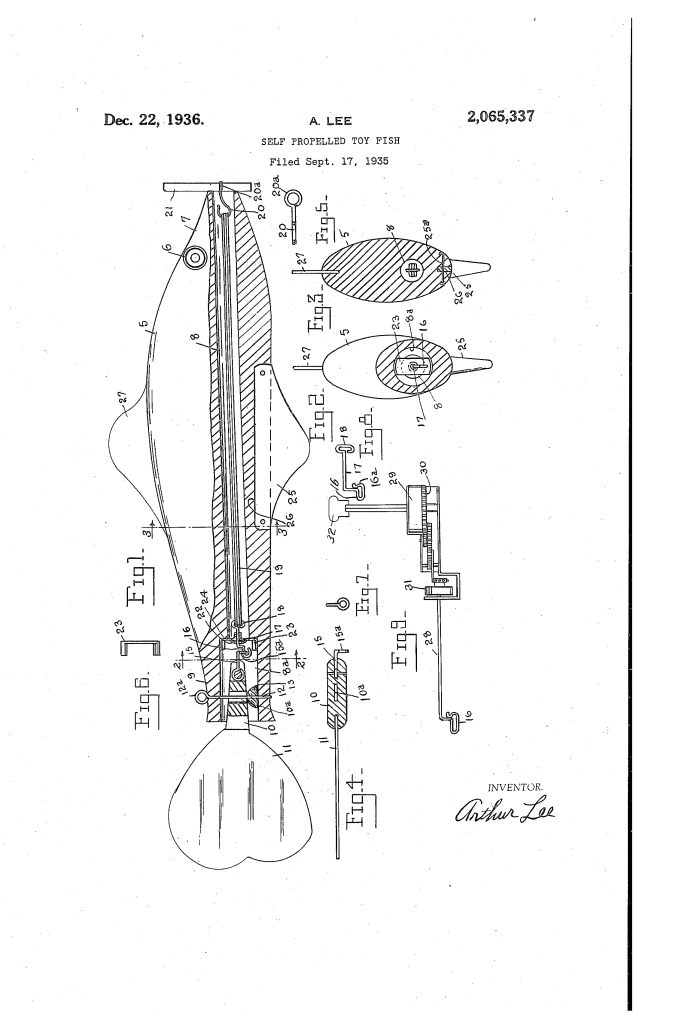
- Mechanical Principle: A connecting pin (12) passes through an oversized slot in the tail arm. A small glass bead (13) acts as a spherical bearing or “rocking point.”
- Function: This allows the tail arm to tilt up and down while simultaneously swinging left and right, preventing the mechanical binding common in rigid single-axis hinges.
2. Eccentric Driver & “Eye” Coupling
The conversion of rotational energy into swimming motion is achieved via an offset linkage.
- The Linkage: The motor shaft ends in an offset hook or eye (16). This is coupled to a similar eye (15a) on the tail arm.
- Modern Term: This is an Eccentric Crank Linkage. As the motor rotates, the offset “eyes” force the tail arm to follow a circular or elliptical path, which the pivot pin translates into the complex “sculling” motion of the tail.
3. Weighted Keel & Buoyancy Control
To ensure the fish maintains a natural “upright” posture rather than rolling over during high-speed tail oscillation.
- The Solution: A weighted lead keel (25) is embedded in a longitudinal slot at the bottom of the body.
- Physics Application: By lowering the Center of Gravity (CG) relative to the Center of Buoyancy (CB), the toy gains “static stability,” allowing the tail to exert maximum force without capsizing the body.
4. Dual-Power Compatibility
Lee’s design was “agnostic” toward its power source, a forward-thinking manufacturing trait.
- Spring-Rubber Motor: Uses twisted elastic bands ($T = k\theta$) for low-cost, easy-to-replace power.
- Clockwork Variation: The housing was designed to optionally accept a geared clock spring motor with a flywheel for more consistent, long-duration swimming.
Comparison Table: Standard Toy Fish vs. The Lee Innovation
| Feature | Standard 1930s Toy Fish | The Lee Toy Fish |
| Tail Motion | Single-axis (Lateral only). | Dual-axis (Lateral + Vertical). |
| Propulsion Type | Simple paddling/resistance. | Sculling/Screw effect (High efficiency). |
| Pivot Mechanism | Rigid hinge (prone to snapping). | Bead-bearing rocker (Fluid movement). |
| Serviceability | Factory-sealed or complex. | Tool-free assembly for children. |
| Stability | Often top-heavy or unstable. | Integrated Lead Keel for upright balance. |
Significance
Arthur Lee’s toy was more than a plaything; it was an exercise in fluid mechanics:
- Precursor to Soft Robotics: The use of compound linkages to mimic organic muscle movement is a foundational concept in modern bio-inspired robotics.
- Hydrodynamic Efficiency: By introducing vertical oscillation, Lee tapped into the “vortex” mechanics that real fish use to conserve energy while swimming.
- User-Centric Design: One of the earliest examples of a complex mechanical patent explicitly designed for “maintenance by a child,” a precursor to modern STEM-educational toys.
