
Scrubbing-Frame: Isaac Watkins (Patent No. 437,849)
The patent by Isaac Watkins of Philadelphia, Pennsylvania, describes a Scrubbing-Frame (Patent No. 437,849), granted on October 7, 1890. This invention is a multifunctional industrial cleaning tool designed to integrate a scrubbing brush, a mop, and a mechanical wringing system into a single, mobile chassis. By allowing a worker to toggle between abrasive scrubbing and absorbent mopping without changing tools, Watkins significantly advanced the ergonomics of 19th-century sanitation.
The “Why”
In the late 1800s, floor maintenance was a grueling, manual labor task that required workers—often domestic servants or industrial cleaners—to oscillate between hands-and-knees scrubbing and standing mop work. The primary “pain point” was the inefficiency and physical strain of managing separate, heavy tools and the hazardous, unsanitary process of wringing out saturated mops by hand. Watkins sought to create a “three-in-one” solution that provided mechanical advantage for wringing and mobility for the entire apparatus.
Inventor Section: Isaac Watkins
Isaac Watkins was an African American inventor living in Philadelphia during a period of intense industrial growth and systemic racial barrier. His engineering philosophy centered on integrated utility. Rather than inventing a new chemical or a simple handle, Watkins focused on the frame—the skeletal architecture of labor. His work reflects the ingenuity of Black inventors of the Jim Crow era who often improved the very tools of the trades they were relegated to, using mechanical physics to reclaim time and reduce bodily wear for the working class.
Key Systems Section
1. The Dual-Axis Pivot Chassis
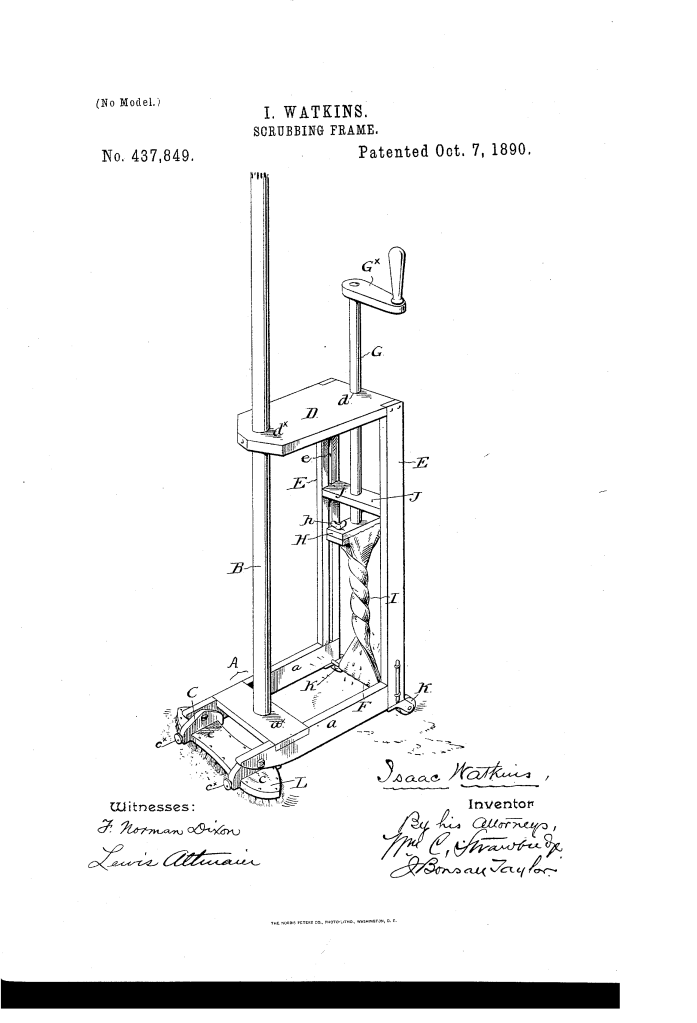
The base piece (A) utilizes a “rocking” architecture. The bars are rounded on the underside, allowing the operator to shift the center of gravity.
- Modern Term: Variable Angle of Attack.
- By tilting the handle (B), the user can engage the brush for friction-heavy scrubbing or the mop for fluid recovery.
2. The Reciprocating Wringing Spindle
This system consists of a vertical rod (G) passing through a headpiece (D) with an integrated crank handle.
- Modern Term: Linear-to-Rotary Torque Actuator.
- The mop is attached to a “keeper” at the bottom and a “holder” on the spindle. Pulling the spindle upward creates tension, while rotating the crank applies torsional force to extrude water.
3. Stabilized Guide Block Assembly
To prevent the spindle from bending under the high torque of wringing, Watkins included a guide block (J) with tenons (j) that slide within vertical mortises (e) in the side braces.
- Modern Term: Linear Slide Way / Lateral Constraint.
- This ensures the force remains centered, preventing mechanical failure of the wooden frame during heavy use.
4. The Rolling Carriage System
Watkins mounted casters (k) to the base block flanking the mop keeper.
- Modern Term: Unidirectional Transaxial Mobility.
- This allows the heavy frame to glide across wet surfaces, reducing the coefficient of friction the operator must overcome.
Comparison Table
| Feature | Standard Methods (Pre-1890) | Watkins’ Innovation |
| Tool Management | Separate brush, mop, and bucket wringer. | Integrated “All-in-One” frame. |
| Wringing Process | Manual hand-twisting (high pathogen risk). | Mechanical crank-driven torsion. |
| Ergonomics | Stooping or kneeling required for scrubbing. | Standing operation via long handle (B). |
| Mobility | Tools must be carried or dragged. | Caster-mounted base for fluid movement. |
Significance Section
- Precursor to the Modern Sponge Mop: The concept of a permanent frame holding a replaceable cleaning element (the “mop holder” with thumb screws) is the direct ancestor of modern commercial mop heads.
- Mechanical Sanitation: Watkins was among the first to formalize the “no-touch” wringing system, a critical advancement in public health and hygiene.
- Industrial Ergonomics: By using a “base block” as a weighted stabilizer, he applied the physics of leverage to domestic labor, reducing the F (force) required by the human operator.
